
- 248
- 8
-


科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互
v0.90.50.20 安卓版

科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互
v3.64.34.39 安卓版

科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互
v5.94.29.98 安卓版

科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互
v1.82.44.94 安卓版

科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互
v2.34.56.82 安卓版

科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互
v4.72.19.16 安卓版

科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互
v9.98.70.05 安卓版

科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互
v0.44.35.77 安卓版

科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互
v9.62.56.10 安卓版
科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互
v8.74.59.14 安卓版

科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互
v0.12.46.58 安卓版

科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互
v4.07.00.97 安卓版

科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互
v2.45.89.76 安卓版

科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互
v7.00.38.48 安卓版

科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互
v2.88.62.10 安卓版
科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互
v9.58.80.79 安卓版

科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互
v7.35.88.27 安卓版

科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互
v9.10.39.09 安卓版

科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互
v9.16.23.63 安卓版

科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互
v8.21.85.89 安卓版

科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互
v8.76.35.69 安卓版

科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互
v7.45.09.72 安卓版

科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互
v2.79.46.68 安卓版

科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互
v2.12.40.98 安卓版
| 分类:单机 / 冒险解谜 | 大小:3.4MB | 授权:免费游戏 |
| 语言:中文 | 更新:2025-08-31 23:25 | 等级: |
| 平台:Android | 厂商: 科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互股份有限公司 | 官网:暂无 |
|
权限:
查看
允许程序访问网络. |
备案:湘ICP备2023018554号-3A | |
| 标签: 科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互 科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互最新版 科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互中文版 | ||
- 详情
- 介绍
- 猜你喜欢
- 相关版本
截图




内容详情
科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互游戏介绍
⚾2025-09-01 05:59 「百科/秒懂百科」【 科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互】🍓支持:32/64bi🐯系统类型:(官方)官方网站IOS/Android通用版/手机APP(2024APP下载)《科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互》
🏈2025-09-01 00:29 「百科/秒懂百科」【 科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互】🍌支持:32/64bi🦈系统类型:(官方)官方网站IOS/Android通用版/手机APP(2024APP下载)《科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互》
🏊2025-09-01 06:53 「百科/秒懂百科」【 科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互】🐳支持:32/64bi🍒系统类型:(官方)官方网站IOS/Android通用版/手机APP(2024APP下载)《科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互》
🦈2025-08-31 23:06 「百科/秒懂百科」【 科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互】🐰支持:32/64bi🐍系统类型:(官方)官方网站IOS/Android通用版/手机APP(2024APP下载)《科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互》
🐬2025-09-01 02:08 「百科/秒懂百科」【 科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互】🐙支持:32/64bi🥌系统类型:(官方)官方网站IOS/Android通用版/手机APP(2024APP下载)《科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互》
科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互版本特色
1. 🐪「科普」🏄 科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互官网-APP下载🎾🥑🦊支持:winall/win7/win10/win11🐦系统类型:科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互下载(2024全站)最新版本IOS/安卓官方入口v9.95.45.21(安全平台)登录入口🍁《科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互》
2. 🤸「科普盘点」🐱 科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互官网-APP下载🎾🥑🦊支持:winall/win7/win10/win11🐦系统类型:科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互下载(2024全站)最新版本IOS/安卓官方入口v3.06.75.03(安全平台)登录入口🍁《科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互》
3. 🍂「分享下」🚴 科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互官网-APP下载🎾🥑🦊支持:winall/win7/win10/win11🐦系统类型:科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互下载(2024全站)最新版本IOS/安卓官方入口v7.55.14.99(安全平台)登录入口🍁《科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互》
4. 🏹「强烈推荐」🤼♀️ 科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互官网-APP下载🎾🥑🦊支持:winall/win7/win10/win11🐦系统类型:科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互下载(2024全站)最新版本IOS/安卓官方入口v6.86.99.13(安全平台)登录入口🍁《科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互》
5. 🐪「重大通报」🏌️ 科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互官网-APP下载🎾🥑🦊支持:winall/win7/win10/win11🐦系统类型:科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互下载(2024全站)最新版本IOS/安卓官方入口v1.75.10.95(安全平台)登录入口🍁《科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互》
6. 🐢「返利不限」🌳 科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互官网-APP下载🎾🥑🦊支持:winall/win7/win10/win11🐦系统类型:科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互下载(2024全站)最新版本IOS/安卓官方入口v7.72.07.33(安全平台)登录入口🍁《科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互》
7. 🏐「欢迎来到」🏀 科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互官网-APP下载🎾🥑🦊支持:winall/win7/win10/win11🐦系统类型:科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互下载(2024全站)最新版本IOS/安卓官方入口v4.93.18.42(安全平台)登录入口🍁《科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互》
8. 🌸「娱乐首选」🦆 科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互官网-APP下载🎾🥑🦊支持:winall/win7/win10/win11🐦系统类型:科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互下载(2024全站)最新版本IOS/安卓官方入口v5.45.73.75(安全平台)登录入口🍁《科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互》
9. ⛳「免费试玩」🤾 科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互官网-APP下载🎾🥑🦊支持:winall/win7/win10/win11🐦系统类型:科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互下载(2024全站)最新版本IOS/安卓官方入口v6.14.69.54(安全平台)登录入口🍁《科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互》
科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互下载方式:
①通过浏览器下载
打开“科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互”手机浏览器(例如百度浏览器)。在搜索框中输入您想要下载的应用的全名,点击下载链接【m.m.jxgzymxz.com】网址,下载完成后点击“允许安装”。
②使用自带的软件商店
打开“科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互”的手机自带的“软件商店”(也叫应用商店)。在推荐中选择您想要下载的软件,或者使用搜索功能找到您需要的应用。点击“安装”即 可开始下载和安装。
③使用下载资源
有时您可以从“”其他人那里获取已经下载好的应用资源。使用类似百度网盘的工具下载资源。下载完成后,进行安全扫描以确保没有携带不 安全病毒,然后点击安装。
科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互安装步骤:
🦛🤽🏇第一步:🏀访问科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互官方网站或可靠的软件下载平台:访问(http://m.m.jxgzymxz.com/)确保您从官方网站或者其他可信的软件下载网站获取软件,这可以避免下载到恶意软件。
🏌️🚴🐌第二步:💐选择软件版本:根据您的操作系统(如 Windows、Mac、Linux)选择合适的软件版本。有时候还需要根据系统的位数(32位或64位)来选择科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互。
🐋🛺🦁第三步:🐼 下载科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互软件:点击下载链接或按钮开始下载。根据您的浏览器设置,可能会询问您保存位置。
⛳🐳🏐第四步:💐检查并安装软件: 在安装前,您可以使用 杀毒软件对下载的文件进行扫描,确保科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互软件安全无恶意代码。 双击下载的安装文件开始安装过程。根据提示完成安装步骤,这可能包括接受许可协议、选择安装位置、配置安装选项等。
🌰🦘🏂第五步:🦘启动软件:安装完成后,通常会在桌面或开始菜单创建软件快捷方式,点击即可启动使用科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互软件。
🎋🏋️🐮第六步:🏈更新和激活(如果需要): 第一次启动科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互软件时,可能需要联网激活或注册。 检查是否有可用的软件更新,以确保使用的是最新版本,这有助于修复已知的错误和提高软件性能。
特别说明:科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互软件园提供的安装包中含有安卓模拟器和软件APK文件,电脑版需要先安装模拟器,然后再安装APK文件。
科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互使用讲解
🎢第一步:选择/拖拽文件至软件中点击“🥉添加科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互”按钮从电脑文件夹选择文件《🐢🧸m.m.jxgzymxz.com》,或者直接拖拽文件到软件界面。

🥀第二步:选择需要转换的文件格式 打开软件界面选择你需要的功能,科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互支持,PDF互转Word,PDF互转Excel,PDF互转PPT,PDF转图片等。

🍃第三步:点击【开始转换】按钮点击“开始转换”按钮, 开始文件格式转换。等待转换成功后,即可打开文件。三步操作,顺利完成文件格式的转换。

进入科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互教程
1.打开科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互,进入科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互前加载界面。
2.打开修改器
3.狂按ctrl+f1,当听到系统“滴”的一声。
4.点击进入科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互,打开选关界面。
5.关闭修改器(不然容易闪退)
以上就是没有记录的使用方法,希望能帮助大家。
科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互特点
🏋️♀️2025-08-31 20:31 🍏MBAChina🐮【 科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互 】系统类型:科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互(官方)官方网站IOS/Android通用版/手机APP(2024APP)【下载次数15497】🤾🏑🍓支持:winall/win7/win10/win11🐠🍃现在下载,新用户还送新人礼包🐙科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互
🥇2025-09-01 01:15 🤼♀️欢迎来到🎾【 科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互 】系统类型:科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互(官方)官方网站IOS/Android通用版/手机APP(2024APP)【下载次数28565】🌴🦨🎾支持:winall/win7/win10/win11🌿🐶现在下载,新用户还送新人礼包🦇科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互
🥋2025-09-01 00:21 🦊HOT🐸【 科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互 】系统类型:科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互(官方)官方网站IOS/Android通用版/手机APP(2024APP)【下载次数50302】🤼⛷️🦐支持:winall/win7/win10/win11🏀🏋️♀️现在下载,新用户还送新人礼包🐯科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互
🤺2025-08-31 19:32 🦎娱乐首选🍊【 科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互 】系统类型:科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互(官方)官方网站IOS/Android通用版/手机APP(2024APP)【下载次数99323】🍐🦧🐮支持:winall/win7/win10/win11🥋🏈现在下载,新用户还送新人礼包🦢科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互
🚵2025-09-01 03:11 👾返利不限🏏?【 科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互 】系统类型:科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互(官方)官方网站IOS/Android通用版/手机APP(2024APP)【下载次数44029】🏂🥇🍊支持:winall/win7/win10/win11🍒👾现在下载,新用户还送新人礼包🍁科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互
相关介绍
🤾ωειcοmε🌴【 科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互 】🐺🦁🍊系统类型:科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互(官方)官方网站-IOS/安卓通用版/手机app🌵支持:winall/win7/win10/win11🌳🌿🌻【下载次数999】🐜🎴现在下载,新用户还送新人礼包🀄科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互
科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互2024更新这边已经有了四大圣人。
> 厂商新闻《科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互》特朗普继续对日本施压:日本需要开放市场 时间:2025-09-01 07:06
- 编辑:CN
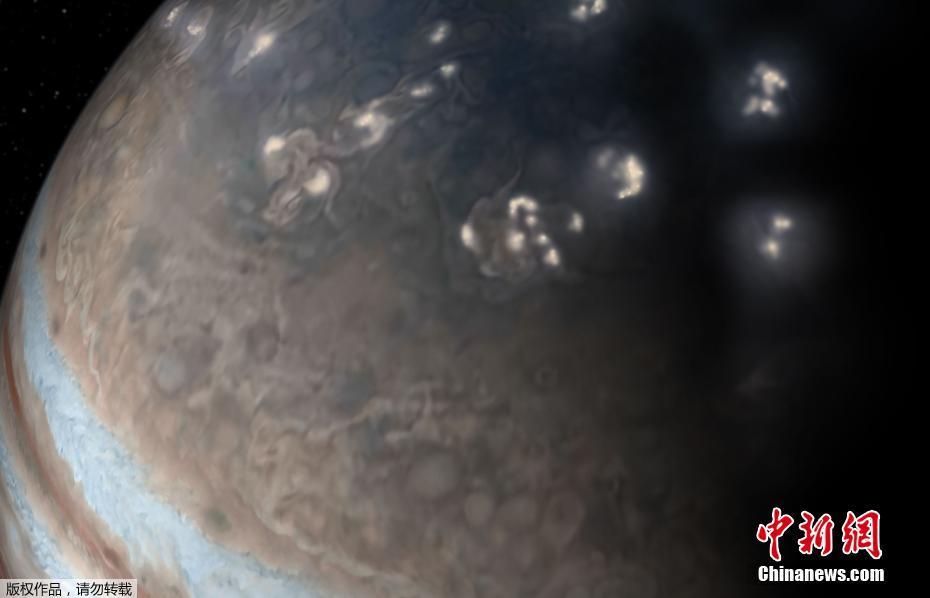
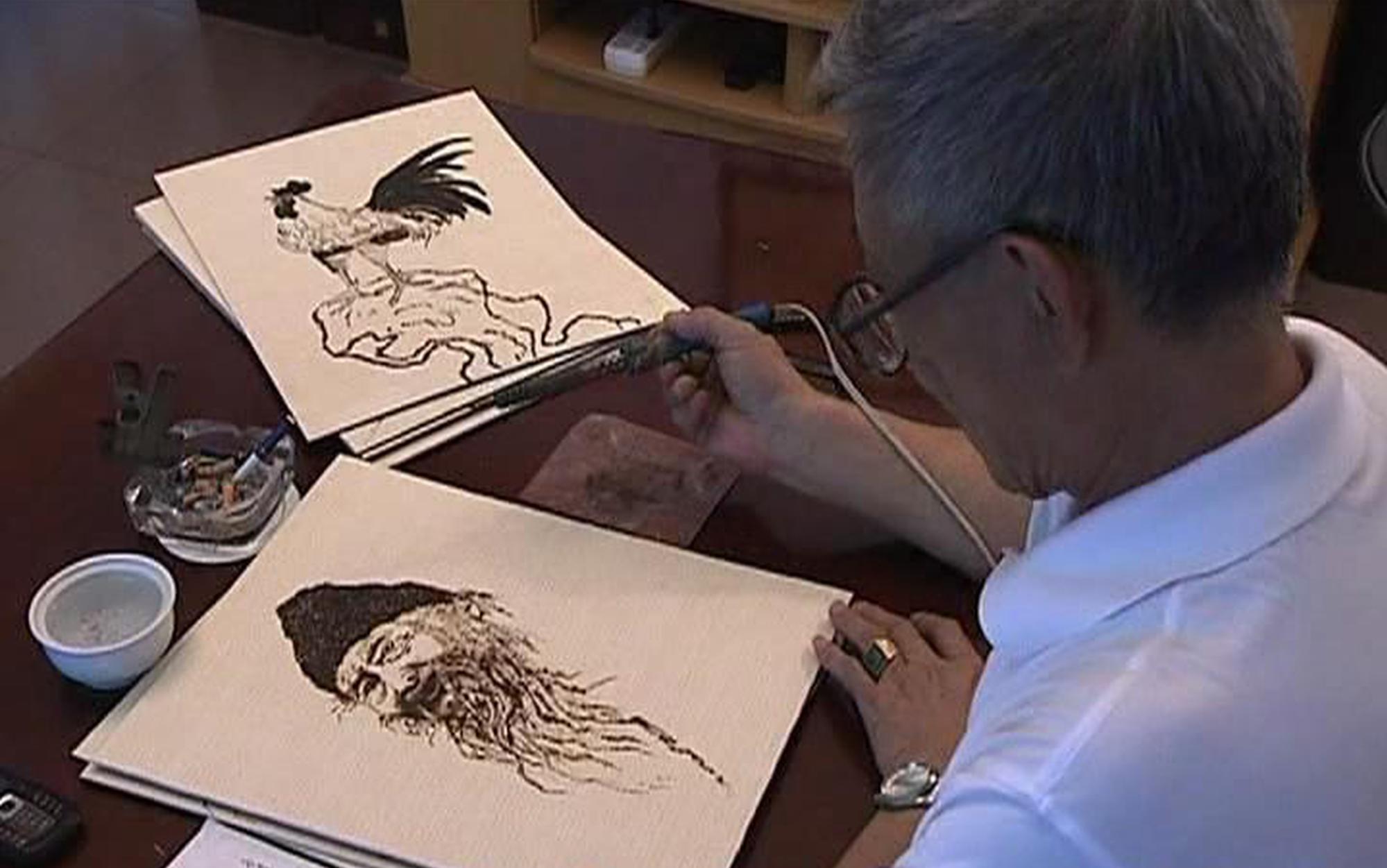
受章鱼吸盘及其神经肌肉层级结构的启发,南方科技大学与英国布里斯托大学合作开发了一种具有自主智能与多模态感知能力的软体机器人系统。
该设计模仿了章鱼吸盘的结构与感知控制机制,使人造吸盘在抓取物体时内部可产生显著的气压变化,这种变化能够触发类似章鱼神经介入信号的响应行为,从而实现对软体机器人动作的智能调控。
值得注意的是,该研究创新性地将吸附、感知与智能控制三大功能整合于单一流体架构中,且无需依赖复杂的电子控制系统。这一仿生技术不仅实现了高效、灵活的抓取与环境感知,还具有广泛的实际应用前景,包括工厂机械手臂、安全人机交互、植入式医疗设备以及农业自动化采摘等多个领域。
图丨 Science Robotics 当期封面(来源:Science Robotics)
审稿人之一认为,该团队所提出的解决方案十分优雅,具有创新性、吸引力与简洁性,值得在Science Robotics期刊上发表。另一位审稿人完全认同作者的愿景,即通过具身智能(embodied intelligence)实现软体机器人控制,从而降低计算需求。
日前,相关论文以《仿章鱼层级化吸附智能的软体机器人具身化设计》(Embodying soft robots with octopus-inspired hierarchical suction intelligence)为题发布在Science Robotics[1],并被选为期刊当期封面。南方科技大学副教授、布里斯托大学荣誉研究员岳天奇是第一作者,布里斯托大学乔纳森·罗斯特(Jonathan Rossiter)教授担任通讯作者。
图丨相关论文(来源:Science Robotics)
真空吸盘作为一种典型的人造仿生工具,其设计灵感直接来源于章鱼的吸盘结构。研究表明,章鱼拥有八条腕足和数百个吸盘,每个吸盘都能够像独立的生命体一样迅速响应外界刺激,自主调整动作以抓取物体。
岳天奇指出:“这说明章鱼的吸盘并非完全由中央大脑控制,很多行为属于自发性的本能反应。生物学报道常称章鱼有九个‘大脑’——实际上,它具备一个中央大脑和每只腕足中一个的局部神经中枢,构成了一种分层式的神经调控系统,用以协调吸盘与动作。”
图丨岳天奇(来源:岳天奇)
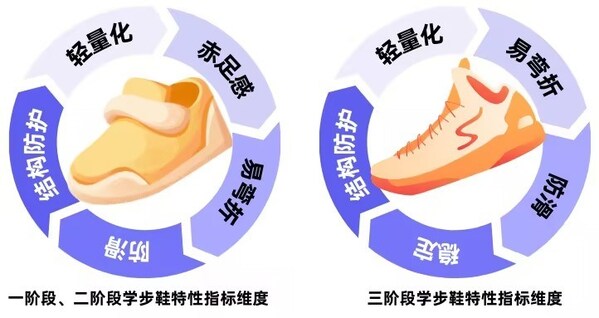
与当前多数依靠复杂结构实现多功能的机器人系统不同,该研究致力于以最简单的结构完成中等复杂度的任务。例如,在工业自动化场景中,传统机械臂通常需依赖视觉传感器、高精度定位装置和中央控制器协同工作,而本研究提出的软体机器人系统凭借其低成本、自主执行能力和结构简洁性,实现了以往难以完成的精细抓取任务。
实验表明,单个软体手指可轻柔抓握脆弱气球而不致其破裂,四指软体手也能稳定抓取无壳鸡蛋和果冻等易损物品。该自主智能系统的核心在于吸盘集成的流体开关结构,它能够根据物理接触自发触发动作调控,无需外接复杂电子控制。
(来源:Science Robotics)
传统控制系统多数是集中在电脑里虚拟系统计算,而该系统采用了一种分层控制架构设计,利用机械结构与物理世界的自发交互行为,模拟下意识动作和控制,并结合简单传统控制算法,不单纯依赖虚拟控制算法或完全机械结构,而是“取长补短”。
传统机器人控制系统多依赖于集中式计算机进行虚拟运算,而本研究提出了一种融合机械结构与物理交互行为的分层控制架构。该系统通过结构与现实世界的自发耦合模拟“下意识”行为,并辅以简易控制算法,实现了机械智能与算法智能的交叉融合。
其创新性体现在高层决策与底层控制的有机结合:底层依靠机械本体特性实现无意识响应,如吸附触发自主收缩;高层则借助单通道气压信号进行算法解析,实现多模态感知,包括判断物体重量、表面粗糙度及干湿状态等。
这一策略显著降低了系统的计算资源需求与成本。实验中所用的硅胶抓取系统总成本控制在二十元人民币以内,较传统机械臂降低约两个数量级。岳天奇对 DeepTech 解释道:“该智能系统具有双重运作机制,底层控制与高层感知可根据任务需求灵活组合,我们提出的是一个可泛化的模块化方法,能够通过微调实现不同运动形态。”
(来源:Science Robotics)
尽管该系统在结构与成本方面优势显著,但需要了解的是,该系统仍存在一定局限性,例如其环境泛化能力目前不及传统机器人系统。岳天奇表示:“未来推动该技术走向产业化,需依据具体应用场景对系统进行针对性适配,像搭乐高一样组合成符合实际任务需求的定制化解决方案。”
岳天奇在布里斯托大学获得博士学位,期间围绕生物启发的真空吸附原理及其在机器人中的应用展开研究,并于近期入职南方科技大学自动化与智能制造学院继续相关探索。
目前,他正致力于将真空吸附机制拓展至人形机器人本体结构设计中。该研究方向有望为人形机器人的构型设计提供新范式,替代传统基于关节(如髋、肩、手部关节)的机械设计方式,从而全面提升机器人的运动效率、行为流畅度与拟人表现,使其动作更自然、更贴近人类。
参考资料:
1.Yue Tianqi et al. Embodying soft robots with octopus-inspired hierarchical suction intelligence.Science Robotics10, 102(2025). DOI: 10.1126/scirobotics.adr4264
更新内容
一、修复bug,修改自动播放;优化产品用户体验。
二、 1.修复已知Bug。2.新服务。
三、修复已知bug;优化用户体验
四、1,交互全面优化,用户操作更加便捷高效;2,主题色更新,界面风格更加协调;3,增加卡片类个人数据
五、-千万商品随意挑选,大图展现商品细节-订单和物流查询实时同步-支持团购和名品特卖,更有手机专享等你抢-支付宝和银联多种支付方式,轻松下单,快捷支付-新浪微博,支付宝,QQ登录,不用注册也能购物-支持商品收藏,随时查询喜爱的商品和历史购物清单。
六、1.bug修复,提升用户体验;2.优化加载,体验更流程;3.提升安卓系统兼容性
七、1、修复部分机型bug;2、提高游戏流畅度;
厂商其他下载
安卓应用 安卓手游 苹果应用 苹果手游 电脑 更多+
-
 潘玮柏唱歌手比嘴忙
潘玮柏唱歌手比嘴忙
-
 樊振东暖心向球迷打招呼
樊振东暖心向球迷打招呼
-
 王源汪苏泷别回家了舞蹈好抽象
王源汪苏泷别回家了舞蹈好抽象
-
 追梦人翻唱
追梦人翻唱
-
 专家:菲律宾休想用台湾威胁中国
专家:菲律宾休想用台湾威胁中国
-
 生万物镜头语言隐喻
生万物镜头语言隐喻
-
 F1
F1
-
 许昕2:3费浚航
许昕2:3费浚航
-
 石宇奇夺世锦赛冠军
石宇奇夺世锦赛冠军
-
 小沈阳魔改美美桑内
小沈阳魔改美美桑内
-
 9月1日开学的我
9月1日开学的我
-
 2025年中国电影总票房破400亿元
2025年中国电影总票房破400亿元
-
 张靓颖合肥演唱会
张靓颖合肥演唱会
-
 瓦科登顶中超射手榜
瓦科登顶中超射手榜
-
 你是我开学唯一带不走的
你是我开学唯一带不走的
-
 杨紫孟子义妆造
杨紫孟子义妆造
-
 杜克一哥的对话太好哭了
杜克一哥的对话太好哭了
-
 凶狠秋老虎来了
凶狠秋老虎来了
-
 汪雨回应京城四少称号
汪雨回应京城四少称号
-
 9月第一天
9月第一天
相关版本
- 中文名:科学家开发具身智能软体机器人系统,有望用于机械手臂和人机交互
- 包名:com.ejiaqrp.dtgen
- MD5:P7ENQIWOC1RTO1T6EP
查看所有 0条评论>网友评论
- 相关游戏
-
 陈小春一字未唱却令全场落泪
陈小春一字未唱却令全场落泪
 梓渝奇遇值破3000万
梓渝奇遇值破3000万
 子夜归14天72小时5个字
子夜归14天72小时5个字
 宋轶发文回应整容争议
宋轶发文回应整容争议
 花1.27亿给大山装扶梯行不行
花1.27亿给大山装扶梯行不行
 孙怡妈妈不希望女儿进厨房
孙怡妈妈不希望女儿进厨房
 孟子义增肥到快88斤了
孟子义增肥到快88斤了
 檀健次帮专家想个文案
檀健次帮专家想个文案
 郭麒麟被外甥写下的惦念温暖
郭麒麟被外甥写下的惦念温暖
 桃黑黑互联网嘴替
桃黑黑互联网嘴替
 马思纯婉拒张晚意分享护肤品
马思纯婉拒张晚意分享护肤品
 专家:阅兵会可能加速武器外销
专家:阅兵会可能加速武器外销
 羽毛球世锦赛
羽毛球世锦赛
 赵丽颖工作室明兰代班营业
赵丽颖工作室明兰代班营业
 檀健次也来跳扫腿舞了
檀健次也来跳扫腿舞了
 周翊然王影璐平行时空里相爱
周翊然王影璐平行时空里相爱
 十二封信寻棠错过第一世
十二封信寻棠错过第一世
 粉丝镜头下的刘雨昕简直薄荷小猫
粉丝镜头下的刘雨昕简直薄荷小猫
 军训必备用品
军训必备用品
 一颗纽扣 两个朋友
一颗纽扣 两个朋友
 华晨宇追星怎么可能追谁都一样
华晨宇追星怎么可能追谁都一样
 张靓颖合肥演唱会
张靓颖合肥演唱会
 为何杀妻案凶手一般不判死立执
为何杀妻案凶手一般不判死立执
 赵丽颖永远别向后看
赵丽颖永远别向后看
 王源转音丝滑到能绕地球三圈
王源转音丝滑到能绕地球三圈
 记者调查防蓝光手机膜真有效吗
记者调查防蓝光手机膜真有效吗
 开学查暑假作业的恐怖瞬间
开学查暑假作业的恐怖瞬间
 微博奇遇记 秀粉复活
微博奇遇记 秀粉复活
 9月第一天
9月第一天
 亲戚对你的态度其实取决于父母
亲戚对你的态度其实取决于父母
 华晨宇萌的不知天地为何物了
华晨宇萌的不知天地为何物了
 抗战精神 薪火永续
抗战精神 薪火永续
 顾客怎么都叫不醒的睡懒觉店员
顾客怎么都叫不醒的睡懒觉店员
 张碧晨加绒摇给我迷成啥了
张碧晨加绒摇给我迷成啥了
 李成钢会谈会见美官员及工商界代表
李成钢会谈会见美官员及工商界代表
 伊朗最高领袖中文发文谈中伊关系
伊朗最高领袖中文发文谈中伊关系
 开学查暑假作业的恐怖瞬间
开学查暑假作业的恐怖瞬间
 北京暴雨
北京暴雨
 黄誉博广州演唱会
黄誉博广州演唱会
 邓超教鹿晗南昌话
邓超教鹿晗南昌话
- 更多>心动网络手游
-
 郭德纲回应被指不爱郭麒麟
郭德纲回应被指不爱郭麒麟
 赵丽颖永远别向后看
赵丽颖永远别向后看
 檀健次古希腊掌管黄海的神
檀健次古希腊掌管黄海的神
 WB一穿三晋级夏决
WB一穿三晋级夏决
 无限暖暖家园家具
无限暖暖家园家具
 亲戚对你的态度其实取决于父母
罗晋目之所及正派反派一起演
亲戚对你的态度其实取决于父母
罗晋目之所及正派反派一起演
 小电驴新国标9月1日实施
小电驴新国标9月1日实施
 屈楚萧一双会爱人的眼睛
屈楚萧一双会爱人的眼睛
 杜克和一哥的跨国情谊
杜克和一哥的跨国情谊
 鹿晗说给邓超上点压力
鹿晗说给邓超上点压力
 李昀锐上次演书生就把我迷的不行
李昀锐上次演书生就把我迷的不行
 这是独属于中国的景色
这是独属于中国的景色
 一颗纽扣 两个朋友
一颗纽扣 两个朋友
 鹿晗说了老婆好
鹿晗说了老婆好
 专家解读九三阅兵看什么
专家解读九三阅兵看什么
 董璇说我又要办婚礼了
董璇说我又要办婚礼了
 毛晓彤奇迹彤彤
毛晓彤奇迹彤彤
 再见了2025的夏天
再见了2025的夏天
 李庚希宋亚轩主演敬山水
李庚希宋亚轩主演敬山水
 生万物镜头语言隐喻
生万物镜头语言隐喻
 南通2比1苏州
南通2比1苏州
 2025年中国电影总票房破400亿元
2025年中国电影总票房破400亿元
 91助手下月全面停服
91助手下月全面停服
 罗晋目之所及正派反派一起演
罗晋目之所及正派反派一起演
 F1
F1
 郭德纲回应被指不爱郭麒麟
郭德纲回应被指不爱郭麒麟
 二龙湖村暖花开2开播
二龙湖村暖花开2开播
 追梦格林官宣参加百分大战
追梦格林官宣参加百分大战
 周深的刀马刀马好可爱
周深的刀马刀马好可爱
 晋安翻白眼
晋安翻白眼
 张予曦妈妈不介意女儿谈姐弟恋
张予曦妈妈不介意女儿谈姐弟恋
 檀健次一趟下来打了八百辆车
檀健次一趟下来打了八百辆车
 为何杀妻案凶手一般不判死立执
为何杀妻案凶手一般不判死立执
 文青努力前行回忆领奖瞬间
文青努力前行回忆领奖瞬间
 阅兵会出现更先进高超声速导弹吗
阅兵会出现更先进高超声速导弹吗
 陈咏诗获2025香港小姐冠军
陈咏诗获2025香港小姐冠军
 假面骑士加布大结局
假面骑士加布大结局
 李忆 人生成功一次就行了
李忆 人生成功一次就行了
 Edge Of My Life原版MV
Edge Of My Life原版MV
- 更多>mod游戏
-
 以前嘲笑痞老板和电子屏幕谈恋爱
以前嘲笑痞老板和电子屏幕谈恋爱
 台风送来的海豹“阿侬”成海南团宠
台风送来的海豹“阿侬”成海南团宠
 十二封信寻棠错过第一世
十二封信寻棠错过第一世
 超级夏晚跨次元舞蹈秀纯享舞台
超级夏晚跨次元舞蹈秀纯享舞台
 何广智共情长安的荔枝
何广智共情长安的荔枝
 苏新皓偶遇儿时舞蹈老师
苏新皓偶遇儿时舞蹈老师
 山东泰山6:0北京国安
山东泰山6:0北京国安
 梓渝泥潭入围亚洲流行音乐大奖
梓渝泥潭入围亚洲流行音乐大奖
 胡塞武装高层多人死于以军空袭
胡塞武装高层多人死于以军空袭
 伪装者
伪装者
 香港小姐总决赛红毯群星璀璨
香港小姐总决赛红毯群星璀璨
 男子花22天从北京跑到郑州
男子花22天从北京跑到郑州
 这些年手机屏幕变了多少
这些年手机屏幕变了多少
 苏新皓偶遇儿时舞蹈老师
苏新皓偶遇儿时舞蹈老师
 快手超级夏晚现场有多嗨
快手超级夏晚现场有多嗨
 3兄弟划船横渡太平洋创下世界纪录
3兄弟划船横渡太平洋创下世界纪录
 邓超说今晚演唱会绝杀
邓超说今晚演唱会绝杀
 山东一小学新生报到名字惊艳众人
山东一小学新生报到名字惊艳众人
 杨幂来信
杨幂来信
 电影有朵云像你后劲好大
电影有朵云像你后劲好大
 影视飓风入驻快手
影视飓风入驻快手
 鹿晗说给邓超上点压力
鹿晗说给邓超上点压力
 律师解读特斯拉在美被重罚
律师解读特斯拉在美被重罚
 下一个林书豪在哪里
下一个林书豪在哪里
 曾舜晞吴家祖传滚泥巴
曾舜晞吴家祖传滚泥巴
 肩颈跟练操来了
肩颈跟练操来了
 刘宇千年直拍
刘宇千年直拍
 邓超教鹿晗南昌话
邓超教鹿晗南昌话
 十二封信寻棠错过第一世
十二封信寻棠错过第一世
 肩颈跟练操来了
肩颈跟练操来了
 旺旺总经理赴京看九三阅兵
旺旺总经理赴京看九三阅兵
 男粉对鹿晗大喊老公我爱你
男粉对鹿晗大喊老公我爱你
 陈小春一字未唱却令全场落泪
陈小春一字未唱却令全场落泪
 曾黎秋收采摘
曾黎秋收采摘
 梓渝泥潭入围亚洲流行音乐大奖
梓渝泥潭入围亚洲流行音乐大奖
 梅梦成祯切大号只说最狠的话
梅梦成祯切大号只说最狠的话
 潘玮柏我打我的脸我宠我的粉
潘玮柏我打我的脸我宠我的粉
 WBG夏决见
WBG夏决见
 “子涵梓萱”时代已经过去了
“子涵梓萱”时代已经过去了
 国安创顶级联赛最大分差失利纪录
国安创顶级联赛最大分差失利纪录
- 更多>像素rpg游戏
-
 普京抵达天津出席上合峰会
普京抵达天津出席上合峰会
 孙红雷把地球超新鲜拍成了极挑
孙红雷把地球超新鲜拍成了极挑
 成人安抚奶嘴夜间订单量暴增
成人安抚奶嘴夜间订单量暴增
 张予曦超绝走路气场
张予曦超绝走路气场
 桃黑黑直播
桃黑黑直播
 孟佳漫画腿
孟佳漫画腿
 潘玮柏我打我的脸我宠我的粉
潘玮柏我打我的脸我宠我的粉
 许凯田曦薇新剧互换身体
许凯田曦薇新剧互换身体
 全国普查确认抗战文物超50万件套
全国普查确认抗战文物超50万件套
 开在垃圾堆旁的小摊
开在垃圾堆旁的小摊
 影视飓风入驻快手
影视飓风入驻快手
 鞠婧祎锦鲤妆
鞠婧祎锦鲤妆
 中国女排1比3不敌法国女排
中国女排1比3不敌法国女排
 又有旧的田栩宁可以看了
又有旧的田栩宁可以看了
 军训必备用品
军训必备用品
 毛晓彤千禧年甜妹
毛晓彤千禧年甜妹
 小狗也会生闷气
小狗也会生闷气
 国安创顶级联赛最大分差失利纪录
国安创顶级联赛最大分差失利纪录
 邓超鹿晗高瀚宇一起亚比囧囧囧
邓超鹿晗高瀚宇一起亚比囧囧囧
 全脂手臂
全脂手臂
 鹿晗戴上了邓超的墨镜
鹿晗戴上了邓超的墨镜
 子夜归14天72小时5个字
子夜归14天72小时5个字
 上合峰会欢迎宴会
上合峰会欢迎宴会
 鹿晗说给邓超上点压力
鹿晗说给邓超上点压力
 天津与上合 为什么是“天作之合”
天津与上合 为什么是“天作之合”
 5岁半小狗捡瓶子日入50元
5岁半小狗捡瓶子日入50元
 开学网警来送“网络安全课”了
开学网警来送“网络安全课”了
 古树砸扁宝马 林业局:车主也有错
古树砸扁宝马 林业局:车主也有错
 朔时迟那时快
朔时迟那时快
 华晨宇萌的不知天地为何物了
华晨宇萌的不知天地为何物了
 鞠婧祎锦鲤妆
鞠婧祎锦鲤妆
 林书豪实现了小时候的疯狂梦想
林书豪实现了小时候的疯狂梦想
 陈浩民苑琼丹再扮哪吒母子
陈浩民苑琼丹再扮哪吒母子
 苏超南通9连胜继续领跑
苏超南通9连胜继续领跑
 看出来胡彦斌和万妮达都唱爽了
看出来胡彦斌和万妮达都唱爽了
 贺峻霖 绿海
贺峻霖 绿海
 冻品市场两块一个的牛蛙
冻品市场两块一个的牛蛙
 李庚希宋亚轩主演敬山水
李庚希宋亚轩主演敬山水
 罗晋目之所及正派反派一起演
罗晋目之所及正派反派一起演
 抗战精神 薪火永续
抗战精神 薪火永续
-
2025-09-01
1

-
2025-09-01
2
-
2025-09-01
3

-
2025-09-01
4

-
2025-09-01
5

-
2025-09-01
6

-
2025-09-01
7

-
2025-09-01
8

-
2025-09-01
9

-
2025-09-01
10

-
2025-09-01
11

-
2025-09-01
12

-
2025-09-01
13

-
2025-09-01
14
-
2025-09-01
15

-
2025-09-01
16

-
2025-09-01
17

-
2025-09-01
18

-
2025-09-01
19

-
2025-09-01
20

-
2025-09-01
21
-
2025-09-01
22

-
2025-09-01
23

-
2025-09-01
24

-
2025-09-01
25

-
2025-09-01
26

-
2025-09-01
27
-
2025-09-01
28

-
2025-09-01
29

-
2025-09-01
30

-
2025-09-01
31

-
2025-09-01
32
-
2025-09-01
33

-
2025-09-01
34
-
2025-09-01
35

-
2025-09-01
36

-
2025-09-01
37

-
2025-09-01
38

-
2025-09-01
39
-
2025-09-01
40

-
2025-09-01
41

-
2025-09-01
42

-
2025-09-01
43

-
2025-09-01
44

-
2025-09-01
45

-
2025-09-01
46
-
2025-09-01
47

-
2025-09-01
48

-
2025-09-01
49

-
2025-09-01
50

-
2025-09-01
51

-
2025-09-01
52

-
2025-09-01
53

-
2025-09-01
54

-
2025-09-01
55

-
2025-09-01
56

-
2025-09-01
57

-
2025-09-01
58

-
2025-09-01
59

-
2025-09-01
60

-
2025-09-01
61

-
2025-09-01
62

-
2025-09-01
63

-
2025-09-01
64

-
2025-09-01
65

-
2025-09-01
66

-
2025-09-01
67

-
2025-09-01
68

-
2025-09-01
69

-
2025-09-01
70

-
2025-09-01
71

-
2025-09-01
72

-
2025-09-01
73

-
2025-09-01
74

-
2025-09-01
75

-
2025-09-01
76

-
2025-09-01
77

-
2025-09-01
78

-
2025-09-01
79

-
2025-09-01
80

-
2025-09-01
81

-
2025-09-01
82

-
2025-09-01
83

-
2025-09-01
84

-
2025-09-01
85

-
2025-09-01
86

-
2025-09-01
87

-
2025-09-01
88

-
2025-09-01
89

-
2025-09-01
90

-
2025-09-01
91

-
2025-09-01
92

-
2025-09-01
93

-
2025-09-01
94

-
2025-09-01
95

-
2025-09-01
96

-
2025-09-01
97

-
2025-09-01
98

-
2025-09-01
99

-
2025-09-01
100

-
2025-09-01
101

-
2025-09-01
102

-
2025-09-01
103

-
2025-09-01
104

-
2025-09-01
105

-
2025-09-01
106

-
2025-09-01
107

-
2025-09-01
108
-
2025-09-01
109

-
2025-09-01
110

-
2025-09-01
111

-
2025-09-01
112

-
2025-09-01
113

-
2025-09-01
114

-
2025-09-01
115

-
2025-09-01
116

-
2025-09-01
117

-
2025-09-01
118

-
2025-09-01
119

-
2025-09-01
120

-
2025-09-01
121
-
2025-09-01
122

-
2025-09-01
123

-
2025-09-01
124

-
2025-09-01
125
-
2025-09-01
126

-
2025-09-01
127

-
2025-09-01
128

-
2025-09-01
129

-
2025-09-01
130

-
2025-09-01
131

-
2025-09-01
132

-
2025-09-01
133

-
2025-09-01
134

-
2025-09-01
135

-
2025-09-01
136

-
2025-09-01
137

-
2025-09-01
138

-
2025-09-01
139

-
2025-09-01
140

-
2025-09-01
141

-
2025-09-01
142
-
2025-09-01
143

-
2025-09-01
144

-
2025-09-01
145

-
2025-09-01
146
-
2025-09-01
147

-
2025-09-01
148
-
2025-09-01
149

-
2025-09-01
150

-
2025-09-01
151

-
2025-09-01
152

-
2025-09-01
153

-
2025-09-01
154

-
2025-09-01
155

-
2025-09-01
156

-
2025-09-01
157

-
2025-09-01
158

-
2025-09-01
159

-
2025-09-01
160

-
2025-09-01
161

-
2025-09-01
162

-
2025-09-01
163

-
2025-09-01
164

-
2025-09-01
165

-
2025-09-01
166

-
2025-09-01
167

-
2025-09-01
168

-
2025-09-01
169

-
2025-09-01
170

-
2025-09-01
171

-
2025-09-01
172

-
2025-09-01
173

-
2025-09-01
174

-
2025-09-01
175
-
2025-09-01
176

-
2025-09-01
177

-
2025-09-01
178

-
2025-09-01
179
-
2025-09-01
180

-
2025-09-01
181

-
2025-09-01
182
-
2025-09-01
183

-
2025-09-01
184

-
2025-09-01
185

-
2025-09-01
186

-
2025-09-01
187

-
2025-09-01
188

-
2025-09-01
189

-
2025-09-01
190

-
2025-09-01
191

-
2025-09-01
192

-
2025-09-01
193

-
2025-09-01
194

-
2025-09-01
195

-
2025-09-01
196
-
2025-09-01
197

-
2025-09-01
198

-
2025-09-01
199

-
2025-09-01
200
-
2025-09-01
201

-
2025-09-01
202

-
2025-09-01
203

-
2025-09-01
204

-
2025-09-01
205

-
2025-09-01
206

-
2025-09-01
207
-
2025-09-01
208

-
2025-09-01
209

-
2025-09-01
210

-
2025-09-01
211

-
2025-09-01
212

-
2025-09-01
213

-
2025-09-01
214

-
2025-09-01
215

-
2025-09-01
216

-
2025-09-01
217

-
2025-09-01
218

-
2025-09-01
219

-
2025-09-01
220

-
2025-09-01
221

-
2025-09-01
222

-
2025-09-01
223

-
2025-09-01
224

-
2025-09-01
225

-
2025-09-01
226

-
2025-09-01
227

-
2025-09-01
228
-
2025-09-01
229

-
2025-09-01
230

-
2025-09-01
231

-
2025-09-01
232

-
2025-09-01
233

-
2025-09-01
234

-
2025-09-01
235

-
2025-09-01
236

-
2025-09-01
237

-
2025-09-01
238

-
2025-09-01
239

-
2025-09-01
240

-
2025-09-01
241

-
2025-09-01
242

-
2025-09-01
243

-
2025-09-01
244

-
2025-09-01
245

-
2025-09-01
246

-
2025-09-01
247

-
2025-09-01
248
-
2025-09-01
249

-
2025-09-01
250

-
2025-09-01
251

-
2025-09-01
252
-
2025-09-01
253

-
2025-09-01
254
-
2025-09-01
255

-
2025-09-01
256

-
2025-09-01
257

-
2025-09-01
258

-
2025-09-01
259
-
2025-09-01
260

-
2025-09-01
261

-
2025-09-01
262

-
2025-09-01
263

-
2025-09-01
264
-
2025-09-01
265
-
2025-09-01
266
-
2025-09-01
267

-
2025-09-01
268

-
2025-09-01
269

-
2025-09-01
270
-
2025-09-01
271

-
2025-09-01
272

-
2025-09-01
273

-
2025-09-01
274

-
2025-09-01
275

-
2025-09-01
276

-
2025-09-01
277

-
2025-09-01
278

-
2025-09-01
279

-
2025-09-01
280

-
2025-09-01
281

-
2025-09-01
282

-
2025-09-01
283

-
2025-09-01
284

-
2025-09-01
285

-
2025-09-01
286

-
2025-09-01
287

-
2025-09-01
288

-
2025-09-01
289

-
2025-09-01
290

-
2025-09-01
291

-
2025-09-01
292

-
2025-09-01
293

-
2025-09-01
294

-
2025-09-01
295

-
2025-09-01
296

-
2025-09-01
297

-
2025-09-01
298
-
2025-09-01
299

-
2025-09-01
300

-
2025-09-01
301

-
2025-09-01
302
-
2025-09-01
303

-
2025-09-01
304

-
2025-09-01
305

-
2025-09-01
306

-
2025-09-01
307

-
2025-09-01
308

-
2025-09-01
309

-
2025-09-01
310
-
2025-09-01
311

-
2025-09-01
312

-
2025-09-01
313

-
2025-09-01
314

-
2025-09-01
315

-
2025-09-01
316

-
2025-09-01
317
-
2025-09-01
318

-
2025-09-01
319

-
2025-09-01
320

-
2025-09-01
321
-
2025-09-01
322

-
2025-09-01
323

-
2025-09-01
324
-
2025-09-01
325

-
2025-09-01
326

-
2025-09-01
327

-
2025-09-01
328

-
2025-09-01
329

-
2025-09-01
330

-
2025-09-01
331

-
2025-09-01
332

-
2025-09-01
333

-
2025-09-01
334

-
2025-09-01
335
-
2025-09-01
336

-
2025-09-01
337

-
2025-09-01
338

-
2025-09-01
339

-
2025-09-01
340

-
2025-09-01
341

-
2025-09-01
342

-
2025-09-01
343
-
2025-09-01
344

-
2025-09-01
345

-
2025-09-01
346
-
2025-09-01
347

-
2025-09-01
348

-
2025-09-01
349

-
2025-09-01
350

-
2025-09-01
351

-
2025-09-01
352

-
2025-09-01
353

-
2025-09-01
354
-
2025-09-01
355

-
2025-09-01
356

-
2025-09-01
357

-
2025-09-01
358

-
2025-09-01
359

-
2025-09-01
360

-
2025-09-01
361

-
2025-09-01
362
-
2025-09-01
363

-
2025-09-01
364

-
2025-09-01
365

-
2025-09-01
366

-
2025-09-01
367

-
2025-09-01
368

-
2025-09-01
369

-
2025-09-01
370

-
2025-09-01
371
-
2025-09-01
372

-
2025-09-01
373

-
2025-09-01
374
-
2025-09-01
375

-
2025-09-01
376

-
2025-09-01
377

-
2025-09-01
378

-
2025-09-01
379

-
2025-09-01
380

-
2025-09-01
381

-
2025-09-01
382
-
2025-09-01
383
-
2025-09-01
384

-
2025-09-01
385

-
2025-09-01
386

-
2025-09-01
387

-
2025-09-01
388

-
2025-09-01
389

-
2025-09-01
390
-
2025-09-01
391

-
2025-09-01
392

-
2025-09-01
393

-
2025-09-01
394

-
2025-09-01
395

-
2025-09-01
396

-
2025-09-01
397

-
2025-09-01
398

-
2025-09-01
399

-
2025-09-01
400

-
2025-09-01
1

-
2025-09-01
2

-
2025-09-01
3

-
2025-09-01
4

-
2025-09-01
5

-
2025-09-01
6

-
2025-09-01
7

-
2025-09-01
8

-
2025-09-01
9

-
2025-09-01
10

-
2025-09-01
11

-
2025-09-01
12

-
2025-09-01
13

-
2025-09-01
14

-
2025-09-01
15

-
2025-09-01
16

-
2025-09-01
17

-
2025-09-01
18
-
2025-09-01
19

-
2025-09-01
20

-
2025-09-01
21

-
2025-09-01
22

-
2025-09-01
23

-
2025-09-01
24

-
2025-09-01
25

-
2025-09-01
26

-
2025-09-01
27

-
2025-09-01
28
-
2025-09-01
29

-
2025-09-01
30
-
2025-09-01
31

-
2025-09-01
32

-
2025-09-01
33

-
2025-09-01
34

-
2025-09-01
35

-
2025-09-01
36

-
2025-09-01
37

-
2025-09-01
38

-
2025-09-01
39

-
2025-09-01
40

-
2025-09-01
41

-
2025-09-01
42

-
2025-09-01
43

-
2025-09-01
44

-
2025-09-01
45

-
2025-09-01
46
-
2025-09-01
47

-
2025-09-01
48
-
2025-09-01
49

-
2025-09-01
50

-
2025-09-01
51

-
2025-09-01
52

-
2025-09-01
53

-
2025-09-01
54

-
2025-09-01
55

-
2025-09-01
56

-
2025-09-01
57

-
2025-09-01
58

-
2025-09-01
59
-
2025-09-01
60

-
2025-09-01
61

-
2025-09-01
62

-
2025-09-01
63

-
2025-09-01
64

-
2025-09-01
65
-
2025-09-01
66

-
2025-09-01
67

-
2025-09-01
68

-
2025-09-01
69

-
2025-09-01
70

-
2025-09-01
71

-
2025-09-01
72

-
2025-09-01
73

-
2025-09-01
74

-
2025-09-01
75

-
2025-09-01
76

-
2025-09-01
77

-
2025-09-01
78

-
2025-09-01
79

-
2025-09-01
80

-
2025-09-01
81

-
2025-09-01
82
-
2025-09-01
83
-
2025-09-01
84

-
2025-09-01
85

-
2025-09-01
86

-
2025-09-01
87

-
2025-09-01
88

-
2025-09-01
89
-
2025-09-01
90

-
2025-09-01
91

-
2025-09-01
92

-
2025-09-01
93

-
2025-09-01
94

-
2025-09-01
95

-
2025-09-01
96

-
2025-09-01
97

-
2025-09-01
98

-
2025-09-01
99

-
2025-09-01
100

